Course Description
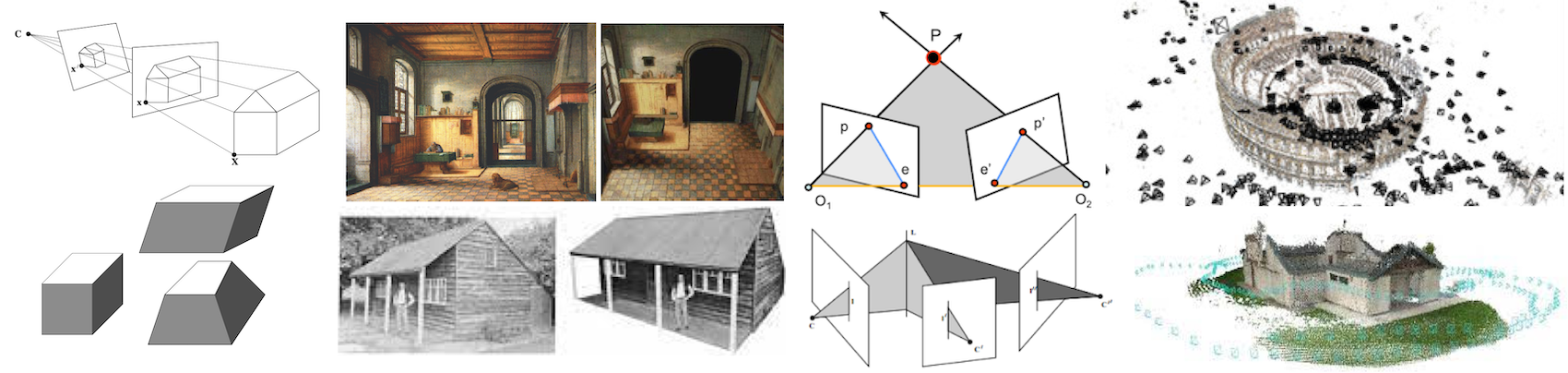
The course focuses on the geometric aspects of computer vision: The geometry of image formation and its use for 3D
reconstruction and calibration. The objective of the course is to introduce the formal tools and results that are
necessary for developing multi-view reconstruction algorithms. The fundamental tools introduced study affine and
projective geometry, which are essential to the development of image formation models. These tools are then used to develop
formal models of geometric image formation for a single view (camera model), two views (fundamental matrix), and
three views (trifocal tensor); 3D reconstruction from multiple images; auto-calibration; and learning based methods.
In particular, this course will cover topics including -
Format and Prerequisites
The course will be lecture-based, and the grades will be determined by assignments (30%), problem sets (30%), a project (35%) and class participation (5%). The course will require as background good coding skills, and an understanding of basics in Computer Vision (e.g. image formation, ray optics) and Linear Algebra (e.g. Vector Spaces, Matrix Factorization).
Course Staff
Please use the course Piazza page for all communication with course staff
Course Instructor
Teaching Assistants

(Smith Hall 110, Zoom)
(NSH 4224, Zoom)
Related Courses
If you found this course useful, you may also be interested in the following related courses/tutorials:
3D Vision (UIUC)
Learning for 3D Vision (CMU)
Multiview 3D Geometry in Computer Vision (UMN)
An Invitation to 3D Vision: A Tutorial for Everyone